1.参考文献地址
2.算法与仿真
a.传统质心定位算法
matlab代码实现:
clc;
close all;
clear all
img=imread('test.png');
img=rgb2gray(img);
img=double(img);
c=sum(sum(img));
[m,n]=size(img);
aa=(1:1:m);
dd=aa*img;
y_c=sum(dd)/c;
bb=(1:1:n)';
x_c=sum(img*bb)/c
figure
set(gcf,'color','w');
imshow(img,[])
hold on
plot(x_c,y_c,'*','MarkerSize',10,'MarkerEdgeColor','r')
b.高斯光质心定位
参考博客:
https://blog.csdn.net/dedell/article/details/107960123
我们认为接收的光强组成式子如下:
其中我们认为星点类光源接收到的光,满足高斯分布,我们也大致认为,波前传感器接收到的光强满足高斯分布,分布公式如下面式子所示:
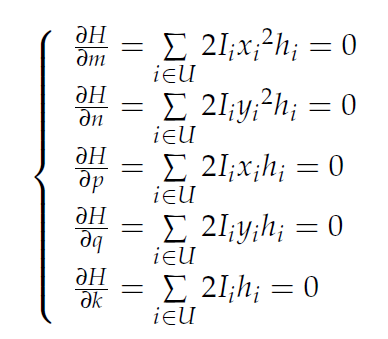
使用快速高斯质心定位算法,其核心公式为:
matlab代码实现
clc;
close all;
clear all
img=double(rgb2gray(imread('test.png')));
k=abs(fftshift(fft2(img)));
img=img;
figure
imshow(k,[])
[m,n]=size(k);
figure
plot(1:m,k(:,n/2))
figure
imshow(img,[])
m1=linspace(0,m,m);
n1=linspace(0,n,n);
[m2 n2]=meshgrid(n1,m1);
I_ix_i2=img.*(m2.^2);
I_iy_i2=img.*(n2.^2);
I_ix_i=img.*(m2);
I_iy_i=img.*(n2);
I_i=img;
where=find(img==0);
bb=img.*log(img);
bb(where)=0;
%% 写这么丑的原因使因为这样子好看原理
aaaa=[sum(I_ix_i2(:).^2) sum(I_ix_i2(:).*I_iy_i2(:) ) sum(I_ix_i2(:).*I_ix_i(:)) sum(I_ix_i2(:).*I_iy_i(:)) sum(I_ix_i2(:).*img(:));
sum(I_ix_i2(:).*I_iy_i2(:)) sum(I_iy_i2(:).^2 ) sum(I_iy_i2(:).*I_ix_i(:)) sum(I_iy_i2(:).*I_iy_i(:)) sum(I_iy_i2(:).*img(:));
sum(I_ix_i2(:).*I_ix_i(:)) sum(I_ix_i(:).*I_iy_i2(:) ) sum(I_ix_i(:).*I_ix_i(:)) sum(I_ix_i(:).*I_iy_i(:)) sum(I_ix_i(:).*img(:));
sum(I_ix_i2(:).*I_iy_i(:)) sum(I_iy_i(:).*I_iy_i2(:) ) sum(I_ix_i(:).*I_iy_i(:)) sum(I_iy_i(:).*I_iy_i(:)) sum(I_iy_i(:).*img(:));
sum(I_ix_i2(:).*I_i(:)) sum(I_i(:).*I_iy_i2(:) ) sum(I_i(:).*I_ix_i(:)) sum(I_i(:).*I_iy_i(:)) sum(I_i(:).*img(:));];
bbbb=-[sum(I_ix_i2(:).*bb(:))
sum(I_iy_i2(:).*bb(:))
sum(I_ix_i(:).*bb(:))
sum(I_iy_i(:).*bb(:))
sum(I_i(:).*bb(:))];
cccc=mldivide(aaaa,bbbb);
x_c=-cccc(3)/cccc(1)/2
y_c=-cccc(4)/cccc(2)/2
t_x=1/sqrt(2*cccc(1))
figure
set(gcf,'color','w');
imshow(img,[])
hold on
plot(x_c,y_c,'*','MarkerSize',10,'MarkerEdgeColor','r')高斯拟合法比灰度质心定位法好很多,这里随机了一百个质心偏移的点,最后误差结果如图所示



